For my final project, I have decided to push forward with O.K.9, the alternative option for pet therapy.
THE PLAN

USER INTERACTION GUIDE
- Distance Sensor reads proximity. When user is in a certain range, the dog’s tongue comes out for a lick. This is made possible by the servo motor.
- When you pet the dog on the back, the force/touch sensor will pick up the range of the force. Depending on what is mapped to that range, an on-screen interaction with the dog will happen.
- When you scratch the dog’s “spot” on his/her belly, the tail will wag. This is controlled by a force/touch sensor mapped to a range. The tail will wag via a servo motor.
- When the user hugs the dog, the dog will react on the screen interface, depending on the range mapped to the flex sensor.

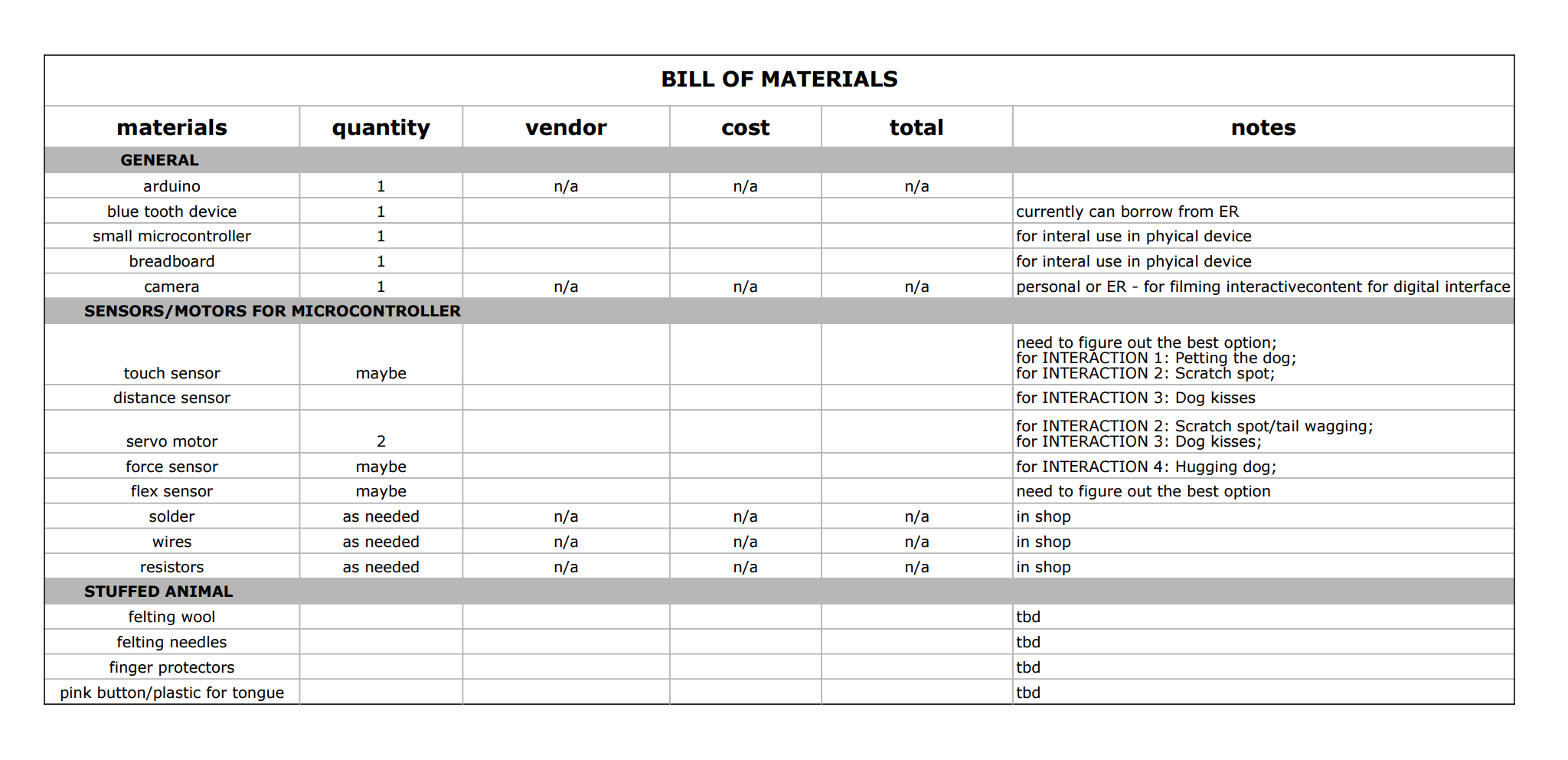
BILL OF MATERIALS
TIMELINE

QUESTIONS
I know that this is an ambitious project, so I am sure that not all of the interactions will get accomplished during this first iteration of the idea. Here are some questions that I have for users during play testing:
- What are the most important interactions that I have projected to accomplish? Which one(s) make you as a user feel better in the process?
- Which interactions (perhaps not on this agenda) with a dog or pet make you feel better?
- What material would you prefer to see the physical interface made of – plush, felted wooling, fabric, other?
- What on-screen visuals would make you feel better, when interacting with the stuffed physical interface – live action video, sounds, other types of visuals?
- What are the best sensors for the petting and belly scratch? Force or touch?
jason
This is awesome! I really enjoy your concept, and just based off of my own family’s challenges in hospitals and dogs, I can really appreciate the driving thought behind this. Excited to see it come into fruition.